Un robot es un dispositivo electrónico y generalmente mecánico capaz de desempeñar tareas automáticamente, ya sea por medio de supervisión humana directa, a través de un programa predefinido o siguiendo un conjunto de reglas generales establecidas. Existen multitud de robots diseñados para cumplir diferentes objetivos: como brazos robóticos para el montaje de piezas en una fábrica, vehículos aéreos no tripulados o los robots móviles terrestres.
El “cuadrúpedo AI” nace de la idea de dos alumnos con ganas de hacer un proyecto visual, no nos valía un proyecto estanco, que no se moviese, que no llamase la atención, y ahí, aparece el Cuadrúpedo.

El robot esta construido con piezas de plastico, ABS o PLA. Nos decantamos por las piezas de plastico por la sencillez que nos ofrecian las impresoras 3D para crear piezas. Aparte las piezas de plastico son de gran ligereza y lo suficientemente robustas para la estructura del cuadrupedo. Las piezas de plastico estan impresas en las impresoras 3D del ikaslab, gracias a Tumaker.


Las uniones son los servos FUTABA S3003. Estos servos unicamente tienen tres conexiones, alimentacion (5v) , masa y control Estos van unidos a las piezas de plastico con tornillos como se puede ver en la siguiente imagen:


Para las patas se corto goma con intencion de que no se resbalase por el pavimento, sin esa goma el movimiento del cuadrupedo habria quedado mermado en exceso. Al principio tuvimos problemas con esto, pensamos que sin goma los movimientos serian naturales y andaria normal, pero resulto que no, se resbalaba y se quedaba en el sitio sin avanzar.
Para ello cortamos un trozo de goma y lo pegamos con loctite al ABS de la pata.

Una vez recopiladas todas las piezas el robot queda montado tal que asi, unicamente el chasis sin nada de electronica.

Mientras uno de los componentes del equipo iba montando el esqueleto del robot, el otro iba haciendo los esquemas en Isis y viendo el funcionamiento de este. Para el esquema se utilizo el Arduino Uno puesto que no encontramos la opcion de sacar el Mega. El Isis nos proporciono una idea general de como iba a ser el proyecto pero muy virtual y de forma visual.



Una vez teniamos la placa decidimos crear un escudo "shield" para el Mega, para tratar de manipular menos posible la placa de aprendizaje. Intentamos buscar esa Shield por internet pero no dimos con ella, por lo que en Ares nos dispusimos a diseñarla.
Como se ve en la siguiente imagen esta el archivo del diseño en Ares:

Una vez montada la electronica y formado el cuadrupedo nos dispusimos a hacer la parte logica del proyecto, La aplicacion que la controlaria y el codigo para los motores y el ultrasonico.
La tecnología principal de este proyecto es el Bluetooth. Nos decantamos por el bluetooth puesto que necesitábamos algo que no llevase cables y fuese inalámbrico, otro de los factores claves del bluetooth es su simplicidad y la facilidad que Internet ofrece a esta tecnología.
El cuadrúpedo se controla con el móvil mediante un modulo
Bluetooth y con un programa creado y diseñado con la aplicación App inventor. El App inventor es una plataforma online para preparar programas, se programa mediante una forma visual y no en codigo.


Una vez creado el programa App inventor se procedera a su descarga, se nos bajara un archivo .apk y lo pasaremos al dispositivo Android, unicamente solo con que ejecutemos ese apk se nos instala Nos aparecera asi en nuestro movil:

La interfaz creada sera tal que asi y se vera de esta forma sencilla:

En el video se observa el programa, y dependiendo los botones que se pulsen
el cuadrúpedo reaccionará de una manera
u otra. El programa de Android esta formado por diferentes botones que se explican en el video, excepto dos botones, reset y stop. La primera funcion es que se quede en el suelo con las piernas abiertas, y stop, es un modo en el que el cuadrupedo queda apoyado con las cuatro patas pero de forma relajada.
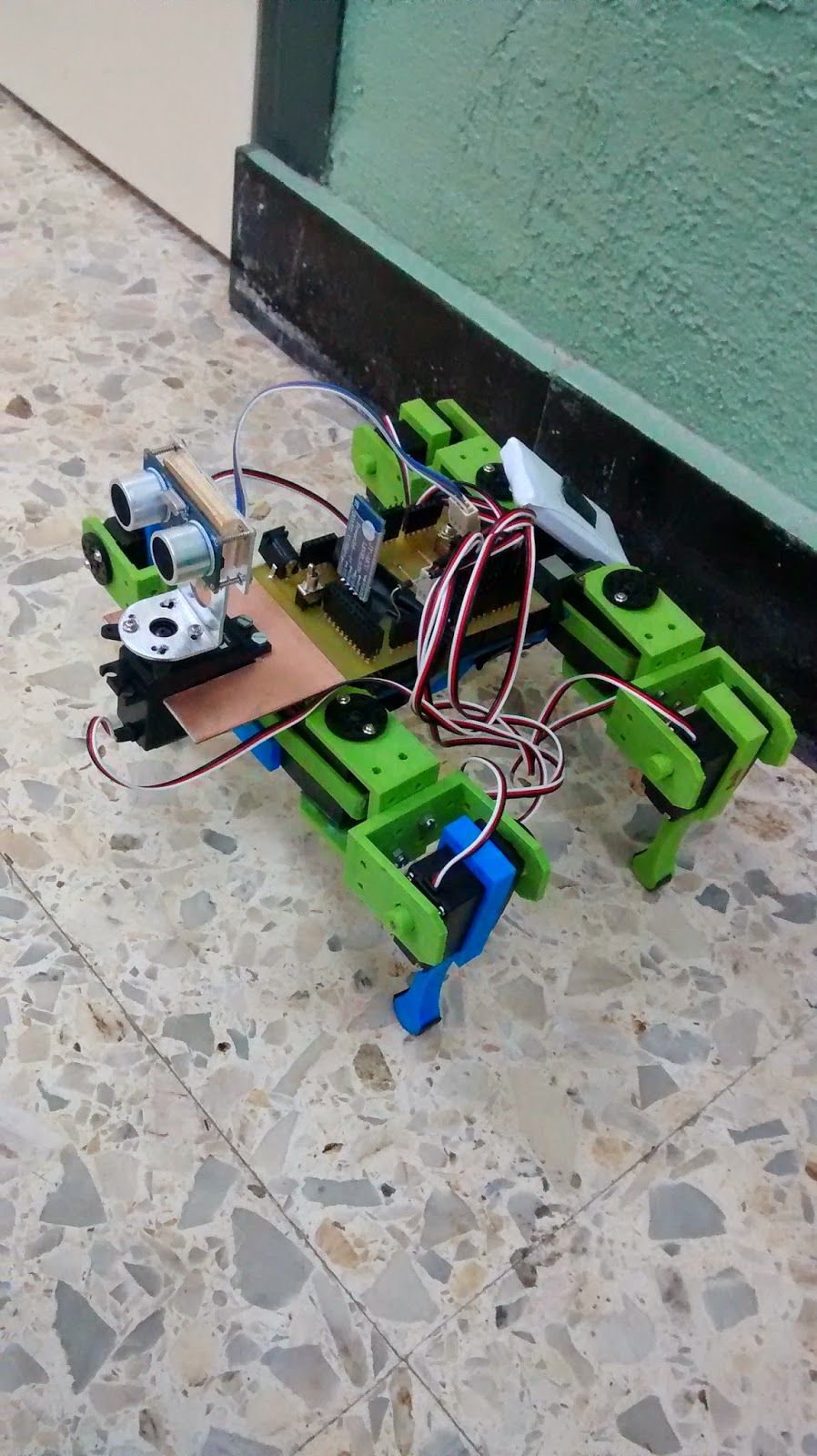
Dispone de un modulo ultrasónico HC-SR04 que permite al cuadrúpedo
andar de forma libre, en modo solitario, pero cuando se encuentra con un objeto
delante de el, esquivarlo de manera natural para poder seguir andando y moviendose por el entorno que le rodea.
Segun el programa cuando el ultrasonico detecta algun obstaculo a menos de 30cm el cuadrupedo se dirige hacia atras.

En el video anterior se observa el programa Android, explicando brevemenete lo que ocurre al pulsar los diferentes botones que forman el programa, con su correspondiente reaccion del cuadrupedo.
Como anexo os adjuntamos el programa que hemos utilizado:
#include <Servo.h>
Servo myservoA;
// create servo object to control a servo
Servo myservoB;
Servo myservoC;
Servo myservoD;
Servo myservoE;
Servo myservoF;
Servo myservoG;
Servo myservoH;
Servo myservoQ;
long medir1;
long medir2;
long medir3;
int TrigPin = 12;
int EchoPin = 13;
int A = 90; //A
- Cadera 1
int B = 90; //B
- Cadera 3
int C = 90; //C
- Cadera 5
int D = 90; //D
- Cadera 7
int E = 90; //E
- Pie 2
int F = 90; //F
- Pie 4
int G = 90; //G
- Pie 6
int H = 90; //H
- Pie 8
int Q = 90;
int incomingByte = 0;
#include <SoftwareSerial.h>
SoftwareSerial mySerial(19, 18); // RX, TX
void setup()
{
// Open
serial communications and wait for port to open:
Serial.begin(9600);
pinMode(TrigPin,OUTPUT);
pinMode(EchoPin,INPUT);
Serial.println("Hello ");
Serial.println("attaching to port_b");
myservoA.attach(9); // attaches
the servo on pin 9 to the servo object
myservoB.attach(8); // attaches
the servo on pin 9 to the servo object
myservoC.attach(6); // attaches
the servo on pin 9 to the servo object
myservoD.attach(7); // attaches
the servo on pin 9 to the servo object
myservoE.attach(2); // attaches the servo on pin 9 to the servo
object
myservoF.attach(3); // attaches
the servo on pin 9 to the servo object
myservoG.attach(4); // attaches
the servo on pin 9 to the servo object
myservoH.attach(5); // attaches the
servo on pin 9 to the servo object
myservoQ.attach(11);
}
void loop()
{
long distance;
distance=medir();
Serial.print( medir() );//Serial
display distance
//Serial.print("cm");
Serial.println();
//delay(1000);
if
(Serial.available() > 0)
{
incomingByte
= Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
if
(incomingByte==0)
{
Serial.print(medir());//Serial display distance
Serial.print("dm");
Serial.println();
// delay(500);
}
if(medir()
==0)
{
if
(Serial.available() > 0) {
incomingByte
= Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
//
delay(500);
}
}
if((medir()<80) &( medir()>=30))
{
cycle_Stop();
Serial.println();
cycle_girar();
Serial.println();
Serial.print( medir2);
Serial.print("d2mD");
Serial.println();
Serial.print( medir3);
Serial.print("d3mD");
Serial.println();
//delay(1000);
}
while((medir2>=medir3)&(medir()<80)
&( medir()>=30)&(incomingByte==55))
{
cycle_Derecha();
if
(Serial.available() > 0)
{
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
distance=medir();
Serial.print( medir());//Serial display distance
Serial.print("d1mD");
Serial.println();
Serial.print( medir2);
Serial.print("d2mD");
Serial.println();
Serial.print( medir3);
Serial.print("d3mD");
Serial.println();
// delay(2000);
}
while((medir2<medir3)&(medir()<80)
&( medir()>=30)&(incomingByte==55))
{
cycle_Izquierda();
if (Serial.available() > 0)
{
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
distance=medir();
Serial.print( medir());//Serial display distance
Serial.print("d1mZ");
Serial.println();
Serial.print( medir2);
Serial.print("d1mZ");
Serial.println();
Serial.print( medir3);
Serial.print("d1mZ");
Serial.println();
//delay(2000);
}
if ((
medir()<30 )&(incomingByte==55))
{
while ((
medir()<60 )&(incomingByte==55))
{
cycle_Atras();
if
(Serial.available() > 0)
{
incomingByte = Serial.read();
Serial.print("He
recibido:");
Serial.println(incomingByte,DEC);
}
distance=medir();
Serial.print( medir() );//Serial display distance
Serial.print("d0m");
Serial.println();
//
delay(1000);
}
}
while((medir() >=80)&(incomingByte==55))
{
cycle_Avance();
distance=medir();
Serial.print(medir());//Serial display distance
Serial.print("d2m");
Serial.println();
//delay(3000);
if
(Serial.available() > 0 )
{
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==50)
{
cycle_Avance();
if
(Serial.available() > 0) {
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==53){
cycle_Stop();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==49){
cycle_Atras();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==56){
cycle_Derecha();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==52){
cycle_Izquierda();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==48){
cycle_Reset();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
while
(incomingByte==54){
cycle_Avance2();
if
(Serial.available() > 0){
incomingByte = Serial.read();
Serial.print("He recibido:");
Serial.println(incomingByte,DEC);
}
}
}
void
cycle_Avance(){
for(A = 90; A
< 150; A += 60) // goes from 30
degrees to 150 degrees
{
myservoE.write(40);
myservoH.write( 140);
myservoF.write(0);
myservoG.write(0);
delay(200); // in steps of 10
degree
myservoA.write(30);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(150);
myservoC.write(90);
delay(200);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=60) // goes from 150
degrees to 30 degrees
{
myservoF.write(40);
myservoG.write(40);
myservoE.write(0);
myservoH.write(180);
delay(200);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(30);
myservoB.write(90);
myservoC.write(150);
delay(200); // waits
15ms for the servo to reach the position
}
Serial.print("Avance");
}
void cycle_Stop(){
myservoE.write( 0);
myservoH.write(180);
myservoF.write(0);
myservoG.write(0);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(90);
myservoC.write(90);
//delay(1000);
Serial.print("Stop");
}
void cycle_Reset(){
for(A = 90;
A < 150; A += 1) // goes from 30
degrees to 150 degrees
{ // in steps of 10
degree
myservoE.write( 90);
myservoH.write(90);
myservoF.write(90);
myservoG.write(90);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(90);
myservoC.write(90);
delay(20);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=1) // goes from 150
degrees to 30 degrees
{
myservoF.write(90);
myservoG.write(90);
myservoE.write(90);
myservoH.write(90);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(90);
myservoC.write(90);
delay(20);
// waits 15ms for the servo to reach the position
}
}
void
cycle_Atras(){
for(A = 90; A
< 150; A += 60) // goes from 30
degrees to 150 degrees
{
myservoE.write(0);
myservoH.write( 180);
myservoF.write(40);
myservoG.write(40);
delay(200); // in steps of 10
degree
myservoA.write(30);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(150);
myservoC.write(90);
delay(200);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=60) // goes from 150
degrees to 30 degrees
{
myservoF.write(0);
myservoG.write(0);
myservoE.write(40);
myservoH.write(140);
delay(200);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(30);
myservoB.write(90);
myservoC.write(150);
delay(200); // waits
15ms for the servo to reach the position
}
Serial.print("Atras");
}
void
cycle_Avance2(){
for(A = 90; A
< 150; A += 60) // goes from 30
degrees to 150 degrees
{
myservoE.write(40);
myservoH.write( 140);
myservoF.write(0);
myservoG.write(0);
delay(150); // in steps of 10
degree
myservoA.write(60);
// tell servo to go to position in variable 'A'
myservoD.write(120);
myservoB.write(120);
myservoC.write(60);
delay(150);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=60) // goes from 150
degrees to 30 degrees
{
myservoF.write(40);
myservoG.write(40);
myservoE.write(0);
myservoH.write(180);
delay(180);
myservoA.write(120);
// tell servo to go to position in variable 'A'
myservoD.write(60);
myservoB.write(60);
myservoC.write(120);
delay(180); // waits
15ms for the servo to reach the position
}
Serial.print("Avance");
}
void
cycle_Izquierda(){
for(A = 90; A
< 150; A += 60) // goes from 30
degrees to 150 degrees
{
myservoE.write(40);
myservoH.write( 140);
myservoF.write(0);
myservoG.write(0);
delay(180); // in steps of 10
degree
myservoA.write(60);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(90);
myservoC.write(90);
delay(180);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=60) // goes from 150
degrees to 30 degrees
{
myservoF.write(40);
myservoG.write(40);
myservoE.write(0);
myservoH.write(180);
delay(150);
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(60);
myservoB.write(90);
myservoC.write(150);
delay(150); // waits 15ms for the servo to
reach the position
}
Serial.print("Izquierda");
}
void cycle_Derecha(){
for(A = 90; A < 150; A +=
60) // goes from 30 degrees to 150
degrees
{
myservoE.write(0);
myservoH.write( 180);
myservoF.write(40);
myservoG.write(40);
delay(200); // in steps of 10
degree
myservoA.write(90);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(90);
myservoC.write(120);
delay(200);
// waits 15ms for the servo to reach the position
}
for(A = 150;
A>=91; A-=60) // goes from 150
degrees to 30 degrees
{
myservoF.write(0);
myservoG.write(0);
myservoE.write(40);
myservoH.write(140);
delay(200);
myservoA.write(30);
// tell servo to go to position in variable 'A'
myservoD.write(90);
myservoB.write(120);
myservoC.write(90);
delay(200); // waits 15ms for the servo to reach the
position
}
Serial.print("derecha");
}
long medir(void)
{
long
dist,duration;
digitalWrite(TrigPin,HIGH);//TrigPin prepare high of more than 10us
delayMicroseconds(11);
digitalWrite(TrigPin,LOW);
duration =
pulseIn(EchoPin, HIGH);//EchoPin received high start counting until the
receiver to the low,return to the count valu
dist =
duration/29/2;//Calculating the distance
cm
// The speed of
sound is 340 m/s or 29 microseconds per centimeter.
return dist;
}
void cycle_girar(){
myservoQ.write(0); //Cargamos la funcion con el valor en grados
de 0 a 179º
delay(200);
medir2=medir();
delay(200); //Retardo entre coordenadas
myservoQ.write(90); //Cargamos la funcion con el valor en grados
de 0 a 179º
delay(200);
medir1=medir();
delay(200);
//Retardo entre coordenadas
myservoQ.write(179); //Cargamos la funcion
con el valor en grados de 0 a 179º
delay(200);
medir3=medir();
delay(200); //Retardo entre coordenadas
myservoQ.write(90); //Cargamos la funcion con el valor en grados
de 0 a 179º
delay(200);
Serial.print("girar");
}
Hola buenas tardes un gran favor sera q pueden adjuntar el archivo .aia para poder abrir el programa con el APP invertor estaria agradecido de antemano! felicidades por el proyecto muy bueno!!
ResponderEliminarBuen día esta interesante el proyecto pero no puedo hacer andar el programa en el app invento , podrías pasarme el archivo te agradecería . FELICITACIONES ES TRABAJO.
ResponderEliminarHola como estas quería saber si Tenes algún vídeo del proyectó funcionando ?
ResponderEliminarEn la parte de arriba hay un video en el que se ve mover a la araña. Salu2
ResponderEliminarHola.. tienes algun esquema donde indiques la posicion de cada servo. es decir el servo conectado al pin3 es cadera o pie? izquierda o derecha?
ResponderEliminar